なぜ今「ぶつからない」クルマが増えているのか
衝突回避システムを知る(1)
センサで前方の障害物を検知し、自動的にブレーキをかけることで衝突を回避するシステムを備えた"ぶつからないクルマ"の速度域が、低速域から高速域に広がろうとしている(図1)。


スウェーデンVolvo社が2009年8月に、速度15km/hまでであれば衝突を回避するシステムを国内に導入したのに続き、2010~2011年にかけて、30km/hでもぶつからないクルマを富士重工業やドイツVolkswagen社、Volvo社が相次いで発売した。
さらに日産自動車は60km/hでも衝突を回避できるシステムを開発中であることを表明している(図2、表1)。

衝突回避システムが高速域まで広がると、どのような効果が期待できるのだろうか。自動車事故のデータの分析によると、速度域が0~30km/hまでの走行では軽傷事故が多いが、40~60km/hでは死亡事故の比率が大きくなっている(図3)。
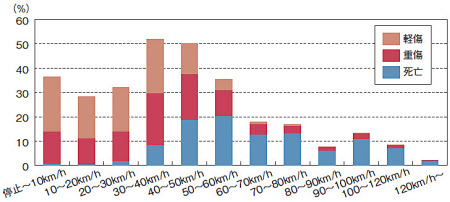
このデータは対自動車だけでなく、対歩行者も含んでいる。そのため、クルマだけに限らず、歩行者も含めた衝突回避システムを、富士重工やVolvo社が実用化している。衝突回避システムが高速域まで使えるようになれば、クルマと歩行者の死亡者の両方を減らせる可能性がある。
"解釈"レベルで規制を緩和
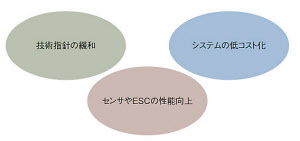
ぶつからないクルマのシステムを支える要素は、三つある。規制(国土交通省の技術指針)の緩和、センサやESC(横滑り防止装置)の性能向上、システムの低コスト化である(図4)。
技術指針では、最近まで衝突回避システムの導入を認めていなかった。ドライバーが「どうせ自動で止まる」と過信することで、逆に事故の被害が悪化することを恐れていたためだ。このため、ミリ波レーダやステレオカメラなどのセンサで前方の障害物を監視し、衝突直前の1.4秒間に限ってESCでブレーキを作動させることを認めていただけだった。
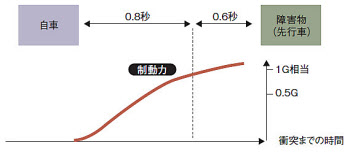
この従来のシステムは「衝突被害軽減ブレーキ」と呼ばれている。その名が示す通り、ぶつかってしまうのは前提だが、衝突時の被害をできるだけ軽減することを目的としていた(図5)。しかし、最近になって自動車メーカー各社が実用化しているのは、衝突を回避できるシステムであり、ここが新しい点だ。
国内で最初に導入したVolvo社は、ブレーキの作動タイミングが衝突前の1.4秒間という従来の技術指針の範囲内でありながら、15km/hまでであれば障害物の手前で止まり、衝突を回避できる機能を「XC60」で実用化した。「自動的にブレーキをかけるのは衝突を回避できない場合のみ」という前提を覆したのだ。
この導入を可能にしたのが、国土交通省の技術指針の"解釈"の追加である(表2)。「各種実験で30km/hまでの低速域であれば、(衝突を回避したとしても)ドライバーの過信を招かないと判断した」(国土交通省)。2009年5月に、国土交通省がこうした解釈を追加したことで、XC60の国内導入が認められたのだ。
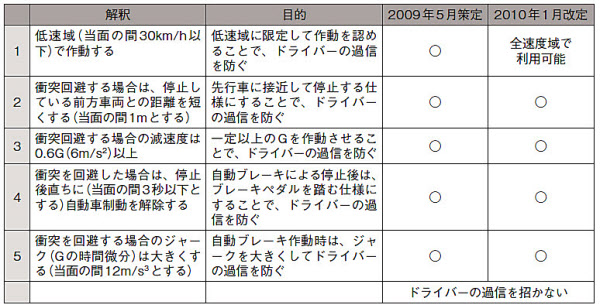
この解釈によって、ドライバーに過信を与えない範囲に限れば、衝突回避システムを実用化できることとなった。具体的には「衝突回避システムは低速域(30km/hまで)で作動し、停止したときの障害物との間隔は1m以内、衝突直前の減速度は0.6G以上、停止したら3秒以内に制動を解除、衝突を回避する場合の減速度の時間微分は12m/s3」(Gは重力加速度、s3は「秒」の3乗)と定めている。
この方針の大転換を受け、国内メーカーも採用を始めた。富士重工は2010年5月に発売した「レガシィ」で、XC60の15km/hを上回る30km/hまでの衝突回避システムを実用化した。
富士重工が実用化したシステムは、Volvo社のシステム導入時に定めた「30km/hまで」の解釈に当てはまるものとなった。ただし、富士重工は、開発時には30km/h以上の高速域でも衝突を回避できるシステムを検討していた。そのため、国土交通省と丹念に交渉を繰り返していた。
結果的にレガシィが装備した衝突回避システムの仕様は「30km/hまで」となったが、逆に国土交通相の技術指針の解釈は再度変更され、従来の「30km/hまで」という制限が取り払われ、全速度域で使えるようになった。 (次回は7月8日に掲載)
[日経Automotive Technology 2011年5月号の記事を基に再構成]









